你好,欢迎来商城
请登录
免费注册
我的订单
|
我的消息
|
我的钱包
|
我的收藏
|
购物车
|
买家中心
|
商家中心
商品
- 商品
- 店铺
- 仪表
- |
- 设备
- |
- 材料
- |
- 备件
- |
- 软件
- |
- 技术支持
我的购物车
全网询价
- 所有商品分类

商品
智能电子元器件 > 传感器 > 速度传感器
———— ————
———— ————



 :
:
现价:待询价
该商品暂无价格,可通过加入询价篮向商家询价
: >







| 品牌 |
WWD |
型号 |
HZD-B-8B-A2 |
| 输出信号 |
模拟型 |
制作工艺 |
集成 |
| 材质 |
金属 |
材料物理性质 |
其他 |
| 加工定制 |
是 |
最大工作温度 |
130℃ |
| 最小工作温度 |
-40℃ |
工作电源电流 |
4~20mA |
| 工作电源电压 |
DC12-24V±10% |
封装/规格 |
常规 |
| 包装 |
盒装 |
最小包装量 |
1 |
| 测量方向 |
水平或垂直或通用 |
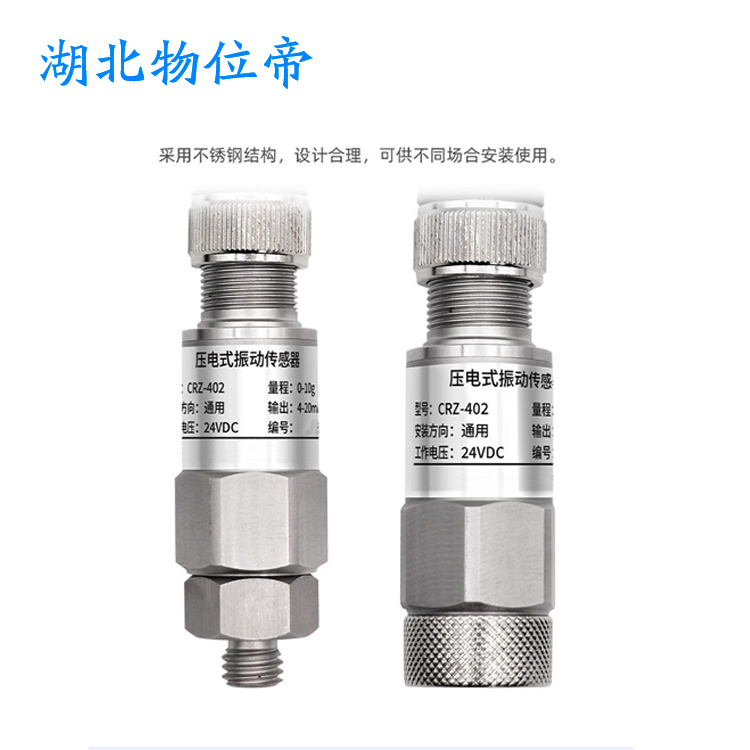
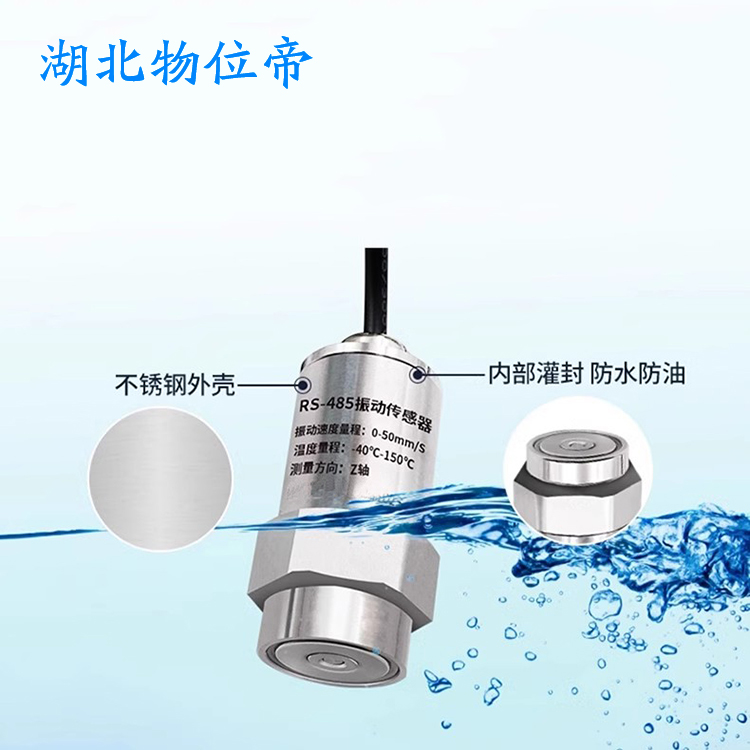
HZD-B-8B-A2 汽轮机一体化振动速度传感器
振动传感器是一种用于检测和测量物体振动状态的装置,它通过感知物体振动产生的物理量(如位移、速度、加速度等),并将其转换为可测量、可传输或可处理的电信号。这些信号随后可用于监测、分析、控制和报警等多种目的。
振动传感器在测试技术中是关键部件之一,它的作用主要是将机械量接收下来,并转换为与之成比例的电量。由于它也是一种机电转换装置。所以我们有时也称它为换能器、拾振器等。
振动传感器并不是直接将原始要测的机械量转变为电量,而是将原始要测的机械量做为振动传感器的输入量,然后由机械接收部分加以接收,形成另一个适合于变换的机械量,Z后由机电变换部分再将变换为电量。因此一个传感器的工作性能是由机械接收部分和机电变换部分的工作性能来决定的。
1、相对式机械接收原理
由于机械运动是物质运动的Z简单的形式,因此人们Z先想到的是用机械方法测量振动,从而制造出了机械式测振仪(如盖格尔测振仪等)。传感器的机械接收原理就是建立在此基础上的。相对式测振仪的工作接收原理是在测量时,把仪器固定在不动的支架上,使触杆与被测物体的振动方向一致,并借弹簧的弹性力与被测物体表面相接触,当物体振动时,触杆就跟随它一起运动,并推动记录笔杆在移动的纸带上描绘出振动物体的位移随时间的变化曲线,根据这个记录曲线可以计算出位移的大小及频率等参数。
由此可知,相对式机械接收部分所测得的结果是被测物体相对于参考体的相对振动,只有当参考体JD不动时,才能测得被测物体的JD振动。这样,就发生一个问题,当需要测的是JD振动,但又找不到不动的参考点时,这类仪器就无用武之地。例如:在行驶的内燃机车上测试内燃机车的振动,在地震时测量地面及楼房的振动……,都不存在一个不动的参考点。在这种情况下,我们须用另一种测量方式的测振仪进行测量,即利用惯性式测振仪。
2、惯性式机械接收原理
惯性式机械测振仪测振时,是将测振仪直接固定在被测振动物体的测点上,当传感器外壳随被测振动物体运动时,由弹性支承的惯性质量块将与外壳发生相对运动,则装在质量块上的记录笔就可记录下质量元件与外壳的相对振动位移幅值,然后利用惯性质量块与外壳的相对振动位移的关系式,即可求出被测物体的JD振动位移波形。
HZD-B-8B-A2 汽轮机一体化振动速度传感器
PR9268/703-000
PR9268/70
PR-9268
PR9268
PR9270
PR9350
PR9376
prt-01-a01-b10-c02-k01
PRT-01





提交成功后,系统会自动将您的文件发送至您的邮箱中
请注意,邮箱输入不正确会发送失败
* 未填写邮箱




